Элементы источников напряжения
Источники напряжения представлены своим внутренним источником ЭДС и внутренним сопротивлением \(Z_k\):
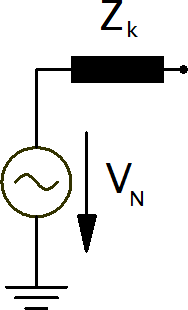
поскольку источник напряжения перемещается к месту повреждения, используя методологию эквивалентного источника напряжения, элемент источника напряжения может быть представлен единственным шунтирующим сопротивлением:

Вкладом нагрузок и шунтов можно пренебречь согласно стандарту. Поэтому им пренебрегают при расчете короткого замыкания.
Внешняя сеть
При расчете максимальных токов короткого замыкания полное сопротивление внешней сети определяется как:
где \(rx\_max\) и \(s\_sc\_max\_mva\) параметры внешней сети а \(c_{max}\) - коэффициент коррекции напряжения для шины, к которой подключена внешняя сеть.
В случае минимальных токов короткого замыкания полное сопротивление рассчитывается соответственно:
Асинхронный двигатель
Асинхронные двигатели можно моделировать указав для элемента «Генератор ВИЭ, КГУ» параметр «двигатель». Затем внутреннее сопротивление рассчитывается как:
где \(sn\_kva\) номинальная мощность двигателя, \(k\) отношение номинального тока к току короткого замыкания а \(rx\) это отношение R/X двигателя. \(vn\_kv\) номинальное напряжение шины, к которой подключен двигатель..
Синхронный генератор
Рассматриваются синхронные генераторы с полным сопротивлением короткого замыкания:
Сопротивление короткого замыкания рассчитывается как:
Коэффициент коррекции генератора \(K_G\) определяется как:
где \(V_{N, bus}\) - номинальное напряжение шины, к которой подключен генератор, \(V_{N, gen}\) - номинальное напряжение генератора, которое определяется параметром \(\text{sn\_kva}\) синхронного генератора. Номинальный угол вектора \(\varphi\) определяется как:
где \(cos\_phi\) определён в параметрах синхронного генератора.